Welcome!
This page documents our team's ME218B Project from 2015. Stanford's ME218B class is focused on the application of Smart Product Design, involving a contextual understanding of software design, electrical engineering, and mechanical design. The following page details our group's experience in developing and constructing an autonomous smart robot that completes a series of tasks.
This page documents our team's ME218B Project from 2015. Stanford's ME218B class is focused on the application of Smart Product Design, involving a contextual understanding of software design, electrical engineering, and mechanical design. The following page details our group's experience in developing and constructing an autonomous smart robot that completes a series of tasks.

Isometric view of the full CAD assembly.
|
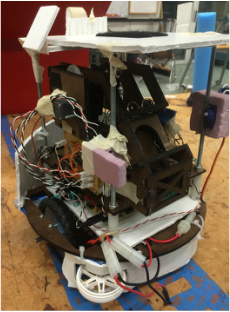
Isometric view of the finished robot Kart.
|
Project Overview
The project this year was to construct an autonomous and untethered robot in the form of a kart that could lap around a track, shoot a ball, and complete an obstacle. The track contained a camera about 10 feet from the ground that could feed coordinates and orientation of the kart to our microprocessor through the form of a colored target. The kart would have to complete anywhere from 3-5 laps and while going around the track, it had to shoot a ball 8 feet from a shooting zone and proceed to climb over a see-saw ramp with a 15 degree incline and 20 degree decline.

Project Approach
Navigation
The kart relies on communication with the DRS (Dr. Ed's Reckoning System) to navigate around the track. Our kart communicates with the DRS through an SPI network and receives both the coordinates and orientation of our current position. We use the coordinate information to signal when to make turns and we use a combination of the orientation information and timers to stop in the new desired direction.
Shooting
Once in the shooting zone, the kart rotates until our IR detecting unit finds the IR signal coming from the target bucket. The kart is then aligned to the target. A servo motor activates the spring loaded ball-kicker mechanism to shoot a ball 8 feet into the bucket.
Obstacle
The kart travels backwards up the see-saw obstacle to avoid any issues with the front ball caster getting caught at front edge of the ramp. The back ball caster and the bumper prevent the kart from tipping over as the see saw shifts to the steeper 20 degree decline.
The kart relies on communication with the DRS (Dr. Ed's Reckoning System) to navigate around the track. Our kart communicates with the DRS through an SPI network and receives both the coordinates and orientation of our current position. We use the coordinate information to signal when to make turns and we use a combination of the orientation information and timers to stop in the new desired direction.
Shooting
Once in the shooting zone, the kart rotates until our IR detecting unit finds the IR signal coming from the target bucket. The kart is then aligned to the target. A servo motor activates the spring loaded ball-kicker mechanism to shoot a ball 8 feet into the bucket.
Obstacle
The kart travels backwards up the see-saw obstacle to avoid any issues with the front ball caster getting caught at front edge of the ramp. The back ball caster and the bumper prevent the kart from tipping over as the see saw shifts to the steeper 20 degree decline.
The Team
We are first year graduate students in Mechanical Engineering with Mechatronics depth.

Team 14: Cesar Ambriz, Hnin Ookhin, Garrett Hara
